Datum zveřejnění:
30. 10. 2020
Odhadování 6D polohy objektů z obrazu je jednou z klíčových úloh pro autonomní systémy vybavené vizuálními senzory. S pomocí přesně odhadnuté polohy pak robot může objekt uchopit a dále s ním manipulovat. Jako příklad si můžete představit domácího robotického pomocníka, který dokáže automaticky naplnit myčku nádobí nebo robota ve výrobě, který manipuluje s předměty na výrobní lince na základě vizuálních vstupů.
Příspěvek “CosyPose: Consistent multi-view multi-object 6D pose estimation” spoluautorů Yanna Labbého (Inria), Justina Carpentiera (Inria), Mathieu Aubryho (ENPC) a Josefa Šivice (CIIRC ČVUT) získal pět ocenění v soutěži prourčení 6D polohy objektu na konferenci ECCV 2020.
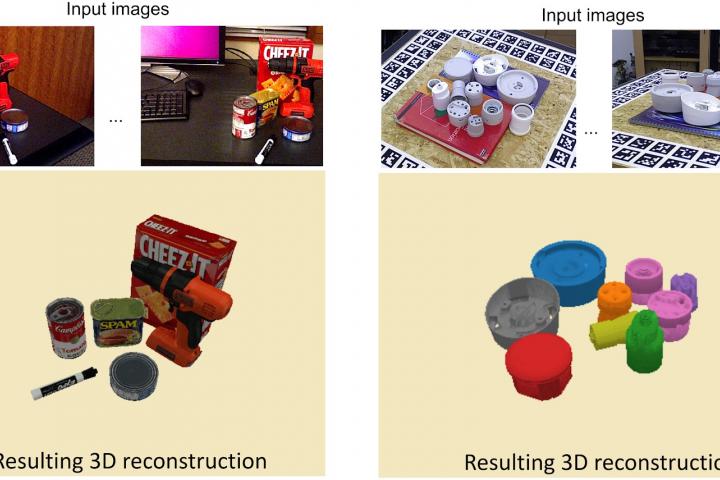
Nově vyvinutá metoda CosyPose odhaduje 6D polohu více objektů ve scéně zachycených jedním nebo několika vstupními obrazy. Hlavní inovací je spojení hlubokých neuronových sítí s metodami odhadování geometrických transformací z více obrazů.