The main aim of the research of a group of multirobotic systems, led by Dr. Martin Saska, will develop basic technology modules and an integrated aviation cognitive robotic system (drones) that will have previously unreachable capabilities in operational reach and safety when interacting with humans, such as human-robotic collaboration at work at heights. Typical examples include repairs or inspections of high-voltage towers or high-rise buildings in general. Researchers will address several major challenges, including how to combine a large operating range of robots with a requirement for centimeter positioning accuracy, how to solve flight control problems with human or infrastructure contact, and how to ensure the safety of robot-human interaction.
In doc. Ondřej Chum’s project, the automatic search in digital images will be generalized beyond the usual search for visual similarity. The research team will study various definitions of kinship and design algorithms for efficient retrieval, and invent new data-information representations. Applications include visual localization with a significant change in view and illumination (day and night), search for diversity in changing environments (such as changes in urban areas, or glacier development), multimodal search (sketch-based image search), cases in medicine. This will lead to a more accurate diagnosis of the patient.
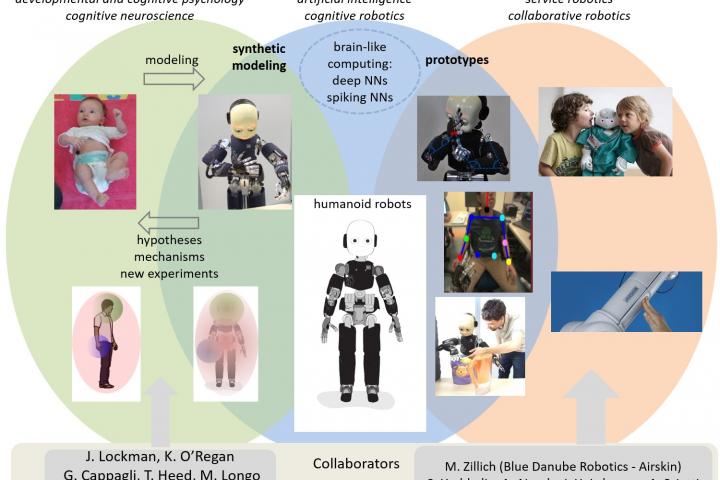
The rapidly growing market for robots working directly with humans, without solid and other usual and annoying barriers, requires human safety through specific technologies such as limiting robotic force or detecting contact and stopping the robot by measuring force interaction. People are aware of their entire body in space by dynamically linking multimodal sensory information, allowing them to adapt and adapt to context-sensitive responses. This is the topic that Dr. Matěj Hoffmann. During his five-year research, his group will focus on research into understanding the mechanisms of body representation and peripersonal spaces in the brain by creating embodied computational models on humanoid robots. Model outputs will be used to design new modules for machine perception and control of robots in the presence of humans and in cooperation of robots and humans.